
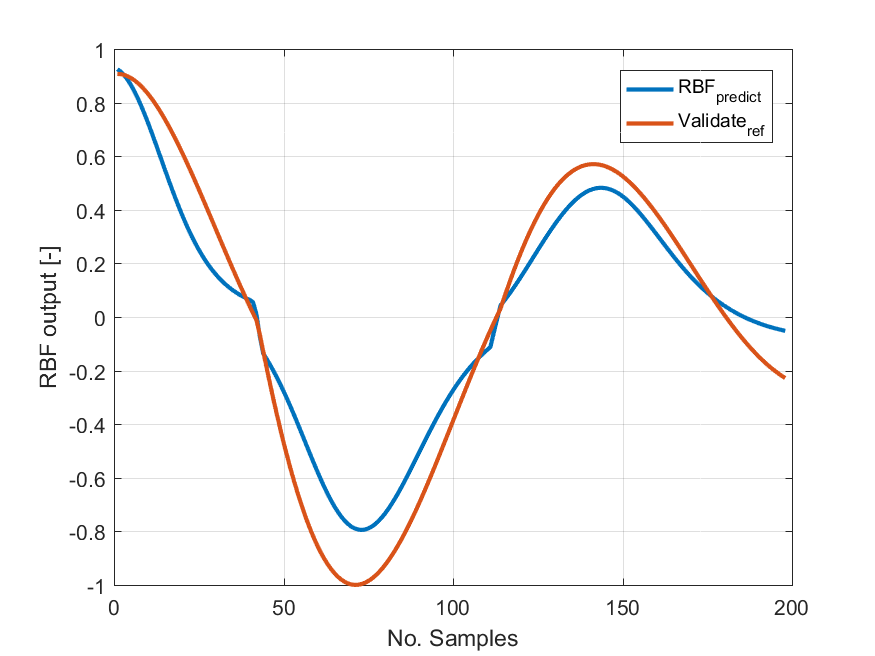
Well, I believe I'm getting closer to this objective (submission is Nov 2019). I've decided to include the two figures below which illustrates the training process (0.2 sec on desktop) and prediction time (0.008 sec) and the accuracy to the true dynamics of the quadcopter drone. In this case the pitch dynamics are being predicted. Although noise hasn't been introduced, it's quite clear from the graphs, that the learning algorithm has enabled the RBF network to accurately capture the dynamics of the quadcopter within a short time period.
This research milestone (quite a big one I might add) has now served as foundation to build a framework for developing more robust/complex machine learning algorithms with the aim of demonstrating the use of machine learning in a real-time/low-cost sense, which could be used to alert when a dynamic system (such as a drone) appears to have a fault.
Exciting times ahead...

Comments
Post a Comment