
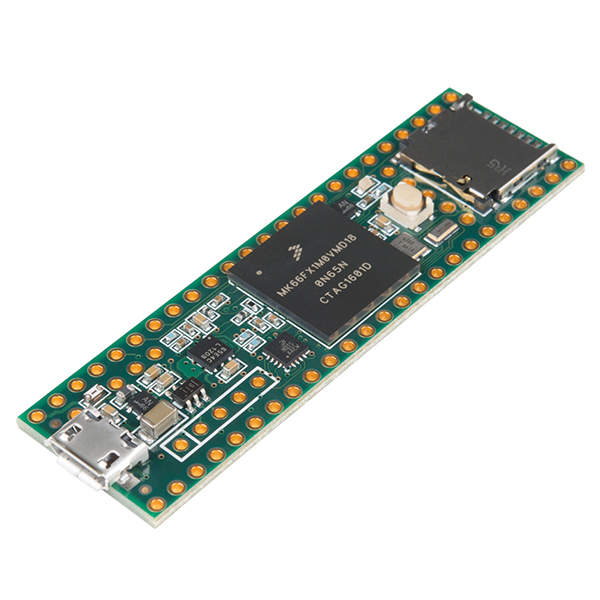
It's amazing how a continuous search at possibilities eventually leads to finding a "needle in a haystack". Introducing the Teensy 3.6 development. It a 32-bit Cortex M4 ARM core with (FPU) at a 1/6th of the price of the Pixhawk (The Pixhawk runs the same chip although has double the Flash memory). Granted, it doesn't have any sensors but man, that's find. Did I also mention that it works straight with arduino code. This means that I've upgraded to the most powerful MCU in the market at the same price as an Arduino Due.
Wow! I overcame my shock by going to Robotics in Centurion and getting my hands on this dynamite. It can even run X-plane flight simulation controls in real-time communicating through the USB port! Ok enough ranting and raving! The point is now I can test the embedded algorithms on a similar ARM-based microcontroller as the Pixhawk and conclude the testing and validation up to HILS level with the sensors in the loop (while emulating the GPS). I can even decide to port across Arducopter code to complete the testing in the event a pixhawk is not available.
All of the sudden, I have a test and integration platform that will allow to full-scale algorithm prototyping on a dev board similar to the one that will be used for flight-testing in a couple of years time. This means I can postpone the acquisition of the flight controller board knowing that a potential alternative (more powerful probably) will come out in the next couple of years. In the meantime, serious code testing and be done and embedded testing can proceed.
Awesome!
Comments
Post a Comment